ハプティクス
感覚としての触覚,技術としての触覚,計測手段,提示手段,応用技術を幅広く紹介
- 発行年月日
- 2026/08/21
- 判型
- A5
- ページ数
- 392ページ
- ISBN
- 978-4-339-02694-8
- 内容紹介
- まえがき
- 目次
【読者対象】
高校生や大学生,大学院生をはじめ,バーチャルリアリティ(VR)や触覚(ハプティクス)の研究を志す初学者。また,ロボティクス,人間工学,インタフェース開発などの分野で触覚提示やセンシング技術の実装に携わる技術者・研究者。
【書籍の特徴】
本書は,「バーチャルリアリティ学ライブラリ」シリーズの一冊として,触覚(ハプティクス)の基礎から応用までを一冊で包括的に学べるよう構成されている。国内の第一線で活躍する総勢29名の触覚研究者が結集し,今後10年に欠かせないと考えられる知見を厳選し,わかりやすく横断的・体系的に解説している。生理学・心理学の基礎知見と,工学的な計測・提示技術がどのように結びついているかを明確に示し,分野の全体像を見渡せる指針となる。
【各章について】
第1章「基礎」では,皮膚に存在する複数の触覚受容器(物理的変形を検知する機械受容器,温度変化を検知する温度受容器,組織損傷を検知する痛覚受容器など)の生理学的メカニズムや,脳内での情報統合,錯覚,クロスモーダルといった知覚・心理特性の基礎を紐解く。 第2章「計測」では,触覚刺激に対する生体応答の計測,およびロボットやシステムに不可欠な触覚・力・モーションセンサの物理的計測技術,さらに感覚の評価方法を解説する。 第3章「提示」では,リアルな触覚をユーザーに伝えるための各種ディスプレイ技術(触覚・力覚・温覚ディスプレイなど)と,そのレンダリング・設計手法を網羅する。 第4章「応用」では,エンタテインメント,情報伝達,感覚変容など,VRや社会実装におけるハプティクス技術の具体的な適用事例と今後の展望を紹介する。
【著者からのメッセージ】
触覚研究は多くの学問分野が交差する,発展が目覚ましく刺激的な領域です。「触覚を学びたいが,どこから手を付ければよいかわからない」という声を耳にすることがあります。本書は,そのような初学者が迷わずに入り込める「最初の入口」となることを目指して執筆されました。先人たちが築き上げてきた「触覚学」の知見を共有し,読者の皆さんが新しい触覚体験やインタフェースを創造するための強固な土台となれば幸いです。
【キーワード】
バーチャルリアリティ/ハプティクス/触覚/機械受容器/皮膚感覚/自己受容感覚/触覚センサ/触覚ディスプレイ/触錯覚/クロスモーダル
☆発行前情報のため,一部変更となる場合がございます
本書の目的は,高校生や大学生などをおもな対象としてとらえ,これらの人々が,ハプティクスという学問に初めて触れるうえで必要となる知識を学ぶ契機を,さまざまな観点から提供することである。
ハプティクスとは何か。この本を手にとっているみなさんは,ハプティクスとは何かをある程度知っているかもしれない。しかし,その境界はどこかと聞かれて自信をもって答えられる人は少ない。1つの答えとして,ハプティクス≒触覚であるという認識は間違ってはいない。ただ,触覚という言葉の定義自体が曖昧であること,ハプティクスの研究対象も徐々に裾野を広げていること,使われる文脈次第でも変わることから,厳密な線引きは難しい。
1つの基準として,本書でおもに取り扱う言葉を図1のように表現してみた。それぞれの言葉の詳しい定義は自分で確認してほしいが,この図で伝えたいことは,“本書が扱う領域は「ハプティクス」という学問領域である”ということだ。すなわちハプティクスという学問領域は,「感覚としての触覚」,「技術としての触覚」の両方を包含している。ハプティクスという言葉は,時に技術のみ,時に感覚のみの意味で使われることがあるが,本書では感覚としての触覚,技術としての触覚,この双方が密接につながる横断的な学問領域であることを皆さんにお伝えしたい。
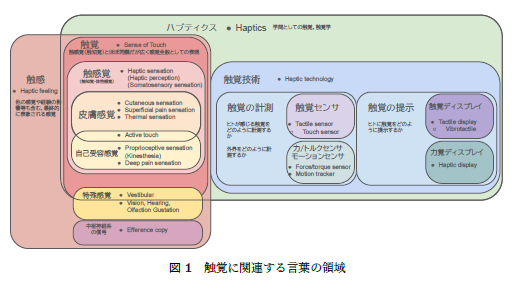
本書ではまず,第Ⅰ部では「感覚としての触覚」を生理学・心理学的な側面を確認する。第Ⅱ部は「技術としての触覚」のうち,おもにその計測手段について,第Ⅲ部では「技術としての触覚」のうち,おもに提示手段について扱う。そして第Ⅳ部ではハプティクスだけでなく,その周辺領域までを幅広くとらえ,ハプティクスの応用事例を扱う。限られた紙面のため,すべてを深く紹介することは難しい。そのため,本書ではそのなかでも,これまでの触覚研究を通じて今後10年に欠かせないと思われる内容を厳選した。
なお,本書ではこの図にない「力覚」という言葉も使われる。これは,大きな意味での「触覚」を,大まかに皮膚感覚と自己受容感覚にわけたときに使われる言葉だ。つまり,皮膚感覚由来の感覚を(狭い意味での)「触覚」,自己受容感覚由来の感覚を「力覚」と工学的に表現すること,この2つをあわせて「力触覚」と表現することがあることを覚えておいてほしい。
参考文献については,可能なかぎり原典へのリンクをデジタルオブジェクト識別子(DOI)として掲載している。電子書籍版ではクリック可能なリンクになっているのであわせて活用してほしい。初学の人にとって英語の文献を読むことは気後れするかもしれないが,研究の積み重ねが学問であることを肌で感じてもらう機会にしてほしい。それぞれのリンク先は閲覧に購読契約が必要なことも多いが,概要を読んで少しでも学問という研究の積み重ねの一端に触れ,より深く理解するための手掛かりとしてもらえると幸いだ。
2026年4月
嵯峨智
第 I 部 触覚の基礎
1.生理学
1.1 皮膚感覚と自己受容感覚
1.1.1 皮膚感覚
1.1.2 自己受容感覚
1.2 触覚を支える神経基盤
1.2.1 末梢から中枢へ
1.2.2 一次体性感覚野
1.2.3 二次体性感覚野
1.2.4 頭頂連合野
1.2.5 高次視覚野
1.2.6 感情的触覚
2.心理学
2.1 知覚特性
2.1.1 皮膚変形の検出
2.1.2 空間分解能
2.1.3 温度の知覚
2.1.4 振動周波数知覚
2.1.5 粗さの知覚
2.1.6 テクスチャ知覚
2.1.7 2次元パターンの知覚
2.1.8 運動の知覚
2.2 アクティブタッチ
2.2.1 探索手続き:判断したい触り心地に応じて変化する手指の動き
2.2.2 物体の触り心地に応じて変化する手指の動き
2.2.3 触り方が変わったときの触り心地への影響
2.2.4 私たちは触り方と触り心地の関係を知っている
2.3 触覚の錯覚
2.3.1 運動の錯覚
2.3.2 触れた物体の距離・大きさの錯覚
2.3.3 形状の錯覚
2.3.4 材質感の錯覚
2.3.5 重さの錯覚
2.3.6 自他区別の錯覚
2.4 クロスモーダル効果
2.4.1 クロスモーダル効果の基礎
2.4.2 代表的なクロスモーダル効果の特徴
2.4.3 神経科学的基盤
2.4.4 多感覚統合の数理モデル
2.4.5 触覚と他の感覚モダリティとの相互作用
2.4.6 クロスモーダル触覚の応用と展望
2.5 触覚のことば
2.5.1 感覚や情動のカテゴリとことば
2.5.2 形容詞による触覚のカテゴリ化
2.5.3 オノマトペによる触覚のことばの分布図
2.5.4 触覚のことばによる素材の配置
コラム:かき消される触感
第 II 部 触覚の計測
3.計測法概論
3.1 力触覚情報の計測の目的
3.2 力触覚情報の階層とさまざまな測り方
4.身体運動・物理刺激・性質の計測
4.1 力触覚刺激の種類
4.2 機械刺激の運動学的計測
4.2.1 変位
4.2.2 速度・加速度
4.2.3 振動
4.3 温冷刺激の計測
4.4 機械特性の計測
4.4.1 硬さの計測
4.4.2 摩擦係数の計測
コラム:同じ物理刺激でも異なる感じ方? 社会と力触覚
5.生理学実験と計測手法
5.1 実験計画と仮説
5.2 陽性対照と陰性対照
5.3 交絡要因
5.4 被験者内要因と被験者間要因
5.5 従属変数と独立変数
5.6 実験参加者の選定
5.7 事前登録と再現性の危機
5.8 倫理委員会
5.9 計測方法
5.9.1 脳と脳機能イメージング
5.9.2 ベルベットハンド錯覚に関わる脳内ネットワーク
5.9.3 末梢の活動の計測
6.知覚特性の測定・心理物理測定法
6.1 主観的等価点,弁別閾と検出閾
6.2 古典的な心理物理測定法
6.2.1 恒常法
6.2.2 極限法
6.2.3 調整法
6.3 適応的な心理物理測定法:階段法
6.4 感覚の数量化・尺度化
6.4.1 感覚量
6.4.2 マグニチュード推定法
6.4.3 SD法
7.物理モデリング
7.1 生体の物理モデリング
7.2 皮膚シミュレーション
7.2.1 皮膚シミュレーションの概要
7.2.2 皮膚を平面形状と仮定した物理モデル
7.2.3 皮膚の形状を再現した物理モデル
7.2.4 皮膚シミュレーションの応用事例
7.3 機械受容器シミュレーション
7.3.1 機械受容器シミュレーションの概要
7.3.2 機械受容器の物理モデル
7.4 皮膚-機械受容器シミュレーション
8.センサー
8.1 力触覚センサーの基礎
8.1.1 検出する物理量
8.1.2 主要な検出原理
8.1.3 特性とその評価
8.1.4 人間の特性と触覚センサー
8.1.5 空間分布計測方法と比較
8.1.6 センサーを構成する材料
8.2 さまざまな力触覚センサー
8.2.1 検出原理ごとの事例と比較
8.2.2 検出対象ごとの事例
9.触覚理解のための信号処理
9.1 生体と機械の触覚信号処理
9.2 ハードウェアレベルでの信号処理
9.3 ソフトウェアレベルでの信号分析
9.3.1 周波数情報に基づく信号分析
9.3.2 機械学習に基づく信号分析
第 III 部 触覚の提示
10. 提示法概論
10.1 力触覚情報の提示の目的
10.2 力触覚の機能と提示
10.2.1 手の機能と触覚
10.2.2 触覚,アクティブタッチ,把持操作とハプティクス
10.2.3 身体図式の認識と触覚
10.2.4 手への力触覚提示の研究史
10.2.5 足の機能と触覚
10.2.6 音と触覚
10.2.7 感情的触覚とソーシャルタッチ
10.3 力触覚提示の階層構造
10.4 刺激の作り方
10.4.1 対象ベース
10.4.2 数理モデルベース
10.4.3 記録ベース
コラム:触覚ディスプレイと力覚ディスプレイ
11. 振動刺激
11.1 振動提示デバイス
11.1.1 振動アクチュエーターの種類
11.1.2 振動提示の身体部位
11.2 振動レンダリングのアプローチ
11.2.1 数理モデルベースの振動レンダリング
11.2.2 記録ベースの振動レンダリング
11.2.3 知覚ベースの振動レンダリング
11.3 目的別の振動レンダリング手法
11.3.1 振動パターンの提示と識別性
11.3.2 衝突感
11.3.3 クリック感
11.3.4 テクスチャ感
11.4 振動による臨場感・没入感の表現
11.4.1 振動刺激と臨場感
11.4.2 音響信号に基づく振動生成技術
11.4.3 振動の空間表現技術
12. 力覚
12.1 力覚提示デバイス
12.1.1 力覚提示デバイスとは
12.1.2 接地型
12.1.3 装着型
12.1.4 非接地型
12.1.5 遭遇型
12.1.6 その他のアプローチ
12.1.7 低コスト化・軽量化に向けて
12.2 レンダリング手法
12.2.1 干渉計算
12.2.2 物体表現
12.2.3 デバイスの制約を考慮した設計法
12.3 リーダー・フォロワー制御とバイラテラル制御
12.3.1 リーダー・フォロワー制御とは
12.3.2 基本的なバイラテラル制御
12.3.3 改良されたバイラテラル制御
12.4 疑似力覚
12.4.1 疑似力覚とは
12.4.2 限定型
12.4.3 代替型
12.4.4 疑似力覚提示手法の問題
13. 温度感覚の提示
13.1 温度感覚の提示方法
13.1.1 皮膚温度を変化させる手法・接触式
13.1.2 皮膚温度を変化させる手法・非接触式
13.1.3 皮膚温度を変化させない手法
13.2 温度感覚の計測・レンダリング
13.2.1 温度計測手法
13.2.2 温度変化の算出
13.3 温度感覚提示の注意点
14. 新しい触覚の提示手法
14.1 サーフェイスハプティクス
14.1.1 サーフェイスハプティクスとは
14.1.2 静電気力による方法
14.1.3 たわみ振動による方法
14.1.4 縦振動による方法
14.1.5 弾性表面波による方法
14.2 超音波による空中ハプティクス
14.2.1 超音波による遠隔触覚提示
14.2.2 基本原理と単一焦点の特性
14.2.3 超音波提示デバイス
14.2.4 変調による感度の向上
14.2.5 空中映像への触覚提示
14.2.6 それ以外の触覚提示応用
14.3 神経刺激ハプティクス
14.3.1 神経電気刺激
14.3.2 神経刺激による触覚提示
14.3.3 神経刺激による力覚提示
14.4 硬軟感・やわらかさ感レンダリングと提示デバイス
14.4.1 やわらかさの知覚機序
14.4.2 CASR原理に基づくやわらかさ提示手法
第 IV 部 触覚の応用
15. 触覚の応用概論
15.1 応用の対象である力覚,触覚,触感の違い
15.2 応用における「目的」への着目
15.3 「目的」に基づく応用の分類
16. 触感を設計する
16.1 プロダクトの触感
16.2 触感の設計技術
16.2.1 触感の設計技術
16.2.2 触感の評価・生成技術
16.3 触感設計の事例
16.3.1 触感のデジタルデザイン事例
16.3.2 運動感覚のデジタルデザイン事例
17. 触感を評価する
17.1 なぜ触感を評価するのか?
17.2 触感はどのようにして評価されてきたか?
17.2.1 摩擦試験機型
17.2.2 指モデル接触子
17.2.3 ポータブル型
17.2.4 指装着型・フォースプレート型
17.2.5 圧縮型
17.3 進化する触感評価システム
17.3.1 力触覚刺激を捉える汎用センサー
17.3.2 接触の分布を捉える汎用センサー
17.3.3 ロボット用の触覚センサー
18. 触感を伝える
18.1 触感の伝送
18.1.1 触覚の三原色
18.1.2 触覚の双方向性の活用
18.1.3 触覚伝送のアレンジ
18.2 触覚の伝送の応用例
18.2.1 触覚の記録と再現
18.2.2 触覚の共有
19. 触感を変容する
19.1 複合的な触感
19.2 環境型
19.3 外部支援型
19.3.1 アシストタイプ
19.3.2 介在タイプ
19.4 ウェアラブル型
19.4.1 刺激追加
19.4.2 皮膚特性変化
19.5 クロスモーダル型
19.6 触覚の変容手法の課題と応用性
20. 触覚で代行する
20.1 感覚代行の歴史
20.2 視覚の代行
20.3 聴覚の代行
20.4 身体の代行
21. 触覚をエンタテインメントにする
21.1 静的活動「見る・聴く」(映画,ライブなど)事例
21.1.1 ウェアラブルハプティクス Hapbeat
21.1.2 アップル iPhone
21.1.3 D-BOX の家庭向けハプティックシート
21.1.4 Haptic Vest
21.1.5 Newcastle FC sensory shirts
21.1.6 WOWOW
21.1.7 Powersoft Haptic Tech
21.2 静的活動「遊ぶ」(ゲームなど)事例
21.2.1 プレイステーション・コントローラー
21.2.2 bHaptics TactSuit
21.2.3 Razer ハプティックゲーミングクッション
21.2.4 グローブ型ハプティックデバイス
21.2.5 Sandbox にて触覚技術の活用
21.2.6 ゲームセンターにおける触覚技術の応用
21.2.7 テーマパークで触覚技術の活用
21.3 動的活動「巡る」(美術館,観光など)事例
21.3.1 車載ハプティック音楽
21.3.2 Sony Haptic Floor
21.3.3 電通デジタル「超さわれる美術館」
21.3.4 風ハプティクス
21.4 ハプティクス技術のエンタメ領域への実装分野
コラム:ハプティクスのマーケットとELSI
引用・参考文献
索引
著作
★特設サイトはこちらから★
各書籍の詳細情報や今後の刊行予定,関連書籍などがご覧いただけます。
https://www.coronasha.co.jp/virtual_reality/
関連リンク
おすすめ本
-
-
ヘッドマウントディスプレイ
HMDの性能・違い・選択・進化などを網羅的に取り上げた初めての書籍
-
-
神経刺激インタフェース
VRで感覚を生じさせる仕組みが神経刺激インタフェースである。この分野を1冊で解説。
-
-
アート・エンタテインメントとXR
アート・エンタテインメントとテクノロジー(VRやAI)の相互影響と発展について解説
-
-
ヒューマンインタフェース
本書では,人と情報システムの基礎やHI デザインの原則,デザインプロセスを学べる。
-
-
応用センサ工学
メカトロニクス・ロボティクス分野で代表的なセンサを精選して記述した。センサの役割やセンサに求められる性能などを記述した。
-
-
感覚生理工学
安全で快適な機器を設計するためには,人間の特性に適合した人間中心設計が必要である。人間特性には多くの側面があるが,本書では特に人間中心設計の基となる感覚特性を解説するとともに,その計測および解析手法について説明する。
-

-
ロボット工学ハンドブック (第3版)
ロボットのあらゆる事項を網羅した,最新・最良の必携ハンドブック。全面大改訂版!!
-
-
ロボットハンド技術ハンドブック - その体系的理解:実用・理論・展望 -
ロボットハンドの新たな技術開発(学界)とその社会実装(産業界)との架け橋となる1冊!