バイオメカニクスと運動工学 - 運動機構と神経制御 -
ヒトの運動の理解を中心に,様々な観点から生物機能の工学モデルを学ぶことができる。
- 発行年月日
- 2024/07/08
- 判型
- A5
- ページ数
- 256ページ
- ISBN
- 978-4-339-07280-8
- 内容紹介
- まえがき
- 目次
- レビュー
- 広告掲載情報
【書籍の特徴】
バイオメカニクスが対象とする範囲は広く,それらを本書の中ですべて解説することは難しい。本書では扱う範囲をヒトの運動に絞り,どのようにヒトの運動を理解するのかを中心テーマとして扱った。また,できるだけさまざまな観点からこれまで発表されている生物機能の工学モデルに言及した点も本書の特徴の一つである。
【本書の構成】
第1章では,バイオメカニクスの歴史,取り扱う範囲について解説するとともに,バイオメカニクス研究の基本的な考え方である構成的解析手法を解説した。
第2章では,人体運動器の構成と運動記述のための解剖学について学ぶ。医学,生理学の世界での運動に関する研究の歴史は古い。新しいロボット,特にヒューマノイドを研究したい読者はこの学問分野での成果を学ぶ機会が多い。そのために必要な最低限の知識をまとめた。
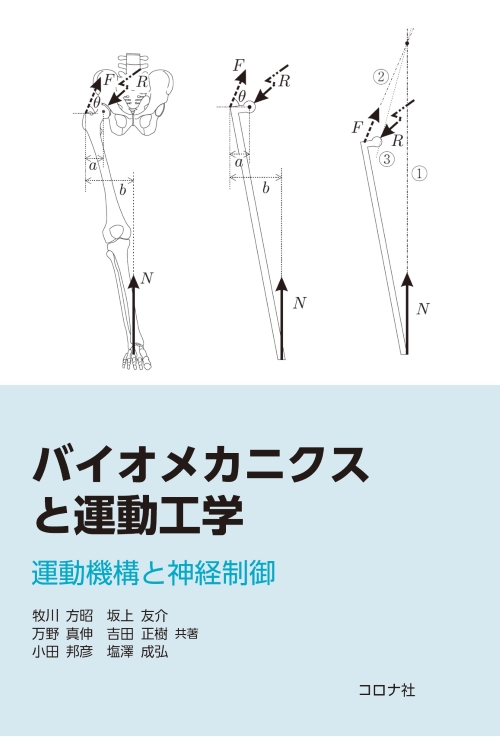
第3章では,人体の運動器のうち,最も理解が進んでいる股関節のバイオメカニクスを対象に,ヒトの運動理解への静力学の適用方法を解説する。
第4章では,ヒトのジョイント,すなわち関節について学ぶ。ヒトのジョイントと機械のジョイントはその動作原理から大きく異なっている。膝関節を中心にヒトのジョイントの構成原理について解説した。
第5章では,バイオメカニクスにおける動力学の適用を学ぶ。ヒトの運動を力学の問題に置き換える方法,運動解析の方法について理解を深めて欲しい。また,この章では,ヒトの歩行についても言及した。
第6章では,ヒトのアクチュエータである筋について学ぶ。筋はエンジン,電気モータにくらべて出力/重量比が高く,エネルギー効率が高いといわれている。筋収縮のメカニズムについて理解を深めて欲しい。
第7章では,バイオメカニクスの応用として,運動計測装置の計測原理,運動のシミュレーション方法を解説するとともに,筋シナジー解析,福祉分野へのバイオメカニクス応用の基礎を解説した。
第8章では,運動のコントロール機能を担うニューロンについて,その構造,発火のメカニズムから,シナプスの生理学について学ぶ。また,基本的なニューロン回路からニューロコンピューティングまでを解説する。
第9章では,脳-神経系について学ぶ。ヒトの運動のコントロールを中心に,脳・脳幹・脊髄の機能,基本的な知覚経路,運動経路,脊髄における反射機構,脊髄内の歩行パターン発生回路についても言及した。
【著者からのメッセージ】
バイオメカニクス,バイオエンジニアリングなどのヒト科学,ヒト技術は今世紀の科学技術の中心になるといわれている。ヒト科学技術を発展させるのは若い読者である。本書が読者のこれからの研究の一助になればと願っている。
biomechanicsは「バイオメカニクス」とカタカナ表記するのが通例である。あえて日本語訳すれば,「生体力学」がふさわしい。生物を力学の観点から眺めようというのがバイオメカニクスである。
本書はロボティクスシリーズの「運動のバイオメカニクス,コロナ社,2008」を改訂し,講義の経験に基づいて新たな内容を付け加えたものである。第1章で示すように,バイオメカニクスが対象とする範囲は広く,それらを本書の中ですべて解説することは難しい。本書では扱う範囲をヒトの運動に絞り,どのようにヒトの運動を理解するのかを中心テーマとして扱った。また,できるだけさまざまな観点からこれまで発表されている生物機能の工学モデルに言及した点も本書の特徴の一つである。
第1章では,バイオメカニクスの歴史,取り扱う範囲について解説するとともに,バイオメカニクス研究の基本的な考え方である構成的解析手法を解説した。
第2章では,人体運動器の構成と運動記述のための解剖学について学ぶ。医学,生理学の世界での“運動"に関する研究の歴史は古い。新しいロボット,特にヒューマノイドを研究したい読者はこの学問分野での成果を学ぶ機会が多い。そのために必要な最低限の知識をまとめた。
第3章では,人体の運動器のうち,最も理解が進んでいる股関節のバイオメカニクスを対象に,ヒトの運動理解への静力学の適用方法を解説する。
第4章では,ヒトのジョイント,すなわち関節について学ぶ。ヒトのジョイントと機械のジョイントはその動作原理から大きく異なっている。膝関節を中心にヒトのジョイントの構成原理について解説した。
第5章では,バイオメカニクスにおける動力学の適用を学ぶ。ヒトの運動を力学の問題に置き換える方法,運動解析の方法について理解を深めてほしい。また,この章では,ヒトの歩行についても言及した。
第6章では,ヒトのアクチュエータである筋について学ぶ。筋はエンジン,電気モータにくらべて出力/重量比が高く,エネルギー効率が高いといわれている。筋収縮のメカニズムについて理解を深めてほしい。
第7章では,バイオメカニクスの応用として,運動計測装置の計測原理,運動のシミュレーション方法を解説するとともに,筋シナジー解析,福祉分野へのバイオメカニクス応用の基礎を解説した。
第8章では,運動のコントロール機能を担うニューロンについて,その構造,発火のメカニズムから,シナプスの生理学について学ぶ。また,基本的なニューロン回路からニューロコンピューティングまでを解説する。
第9章では,脳{神経系について学ぶ。ヒトの運動のコントロールを中心に,脳・脳幹・脊髄の機能,基本的な知覚経路,運動経路,脊髄における反射機構,脊髄内の歩行パターン発生回路についても言及した。
バイオメカニクス,バイオエンジニアリングなどのヒト科学,ヒト技術は今世紀の科学技術の中心になるといわれている。ヒト科学技術を発展させるのは若い読者である。本書が読者のこれからの研究の一助になればと願っている。
2024年5月
著者を代表して 牧川方昭
1. バイオメカニクスの立場と構成的解析手法
1.1 バイオメカニクス研究の歴史
1.2 バイオメカニクスの範囲
1.3 構成的解析手法
章末問題
2. 人体運動器の構成と運動記述のための解剖学
2.1 人体の区分,位置・方向を表す用語
2.2 人体運動器の部品,構成
2.3 運動の表現方法
2.3.1 屈曲/伸展
2.3.2 外転/内転
2.3.3 外旋/内旋
2.3.4 そのほかの運動
章末問題
3. 股関節を例とした静力学
3.1 片脚起立時の股関節における力の釣合い
3.2 股関節力を減らす二つの工夫
3.3 骨
章末問題
4. 膝関節を例としたヒトの関節の構成
4.1 骨と骨の結合
4.1.1 線維性連結
4.1.2 軟骨性結合
4.1.3 滑膜性連結
4.2 関節の構成原理
4.3 生体の軟組織
4.4 不安定な関節
4.5 動きの小さな関節
章末問題
5. 人体運動の推定方法
5.1 運動に関する基本的な物理量
5.2 骨格系剛体の動力学
5.3 歩行の運動方程式
5.4 バイオメカニクスにおける運動方程式の利用
5.5 下腿骨内の応力分布の推定
5.6 歩行
5.7 走行
章末問題
6. 生体アクチュエータとしての筋
6.1 筋と機械アクチュエータの比較
6.2 筋の構造と分類
6.2.1 筋の構造
6.2.2 筋の分類
6.3 筋の収縮
6.3.1 筋収縮の機序
6.3.2 筋収縮の分類
6.3.3 筋の力学モデル
6.4 筋収縮の神経機構
6.5 筋収縮システム
章末問題
7. バイオメカニクスの応用
7.1 運動計測機器
7.1.1 フォースプレート
7.1.2 モーションキャプチャ
7.1.3 骨格推定
7.2 運動の定量理解
7.2.1 関節トルクの解析
7.2.2 運動シミュレータ
7.3 筋シナジー解析
7.4 福祉領域でのバイオメカニクス
章末問題
8. 生体コンピュータの基本回路としてのニューロン
8.1 ニューロンの構造
8.2 ニューロン発火のメカニズム
8.3 機能的電気刺激
8.4 ニューロン発火の等価電子回路モデル
8.5 BVPモデル
8.6 軸索上の活動電位の伝搬
8.7 シナプス
8.8 基本的なニューロン回路
8.9 シナプスの可塑性
8.10 ニューロコンピューティング
章末問題
9. 運動コントロールのソフトウェア
9.1 脳・神経系
9.2 中枢神経系
9.2.1 大脳
9.2.2 間脳
9.2.3 脳幹
9.2.4 小脳
9.2.5 脊髄
9.3 末梢神経系
9.4 種々の神経伝導路
9.4.1 下降性伝導路
9.4.2 上行性伝導路
9.5 運動における小脳の役割
9.6 中枢プログラム
章末問題
おわりに
付録
A.1 非線形微分方程式の定常解の安定性
A.2 リミットサイクル
A.3 側抑制回路
引用・参考文献
章末問題解答
索引
読者モニターレビュー【 JAZZCAT 様(業界・専門分野:製鉄用機械設計、技術サービス、技術教育)】
レビュアーは、牧川他5氏による著書「バイオメカニクスと運動工学」をレビュー致しました。その結果を箇条書きにて、下記致します。
① 本書は、類書と比較して、専ら、人体を題材として、そこから、
『(工学的な)モデル化→解析→解析結果の解釈→実際問題への適応』の説明が、詳細になされている点が、大きな特徴であると思った。
類書は意外にも(機械系のケースでは)、4力の説明が簡潔に説明され、あとは、多少の生体工学の内容に触れているだけのように感じることが多く、やや中途半端で終わってしまっているように感じていた。
② 各章をレビューした結果を章毎に記述する:
1章:バイオメカニクスの歴史(意外と驚くべきことが書かれており、非常に勉強になる)、研究範囲、研究の手法(バイオメカニクス独特の方法が説明されており、「このような手法もあるのか」と、新しい視点を得ることができるように感じた)が書かれており、イントロとして、是非一読すべき章だと思った。
2章:本章では主として、「ヒトの運動」を扱うと「まえがき」に述べられている通り、それに対応する、ヒトの解剖学上、必要となる事項について説明されている。後章で必要となる用語などが詳細に説明されているので、必読ではあるが、若干専門性が高いので、時間の無い読者は、先に後章に進み、必要に応じて、本章を読み返すので構わないと感じた。
3章:4、5章の前段階として、確実に理解すべき事項が記載されている。静力学は動力学の特別な場合であることを考えれば、単純に解ける問題で理解を確実にすることは、後々、(動力学などのより高度な問題を解く上で)必ず有利となる。本章でも、上記1. に示した課題解決の方法(『』で囲んだ部分)を踏襲しており、また、人体での結果解釈も丁寧に述べられているので、本章は時間をかけて丁寧に読むことをお勧めしたい。
4~5章:本書のコアとなる重要な章であると考える。人体の動きの基本となる、関節の構成原理に始まり、バイオメカニクスにおける運動方程式の適用と、実際に解析を行う上での、現実に即したパラメータを、計測方法を交えて、詳しく解説されている。
また、歩行や走行といった、生活に密着した内容を、バイオメカニクス的にどのように扱い、解釈するかについても、分かりやすい図を用いて、解説されている。
6~9章:6~9章は、6章、7章、8~9章と3つに分けて読まれるのが良いと感じた。
いずれの章も、バイオメカニクスの内容としては、必須項目と考えるが、時間の取れない読者にとっては、やや特論的な内容かと思われる。
まずは、5章までをじっくり読まれ、7章で、実際に測定するための方法を、必要な部分のみを読まれるのが良いと思う(5章での運動方程式中に現れるパラメータを決定するための測定方法が書かれているため)。その上で、6章にて、動くための原動力である「筋」について勉強されれば、理解が深まるのではないかと感じた。
8~9章は、脳に関する事項であるが、1~7章までとは異なり、若干専門性、数学的要素が強い内容となっている。時間の取れる読者、数学(非線型力学)に興味のある読者は、読まれると良いかと思う。
以上、簡単ではありますが、本書をレビューした結果を記載致しました。本書をご購入予定の方々のご参考になれば、非常に幸いです。
読者モニターレビュー【 おみにゃ 様(業界・専門分野:制御工学)】
現在、様々な人型ロボットが開発されている。しかし、人工知能を備えた本格的なヒューマノイドの開発は未だ幾つかの技術的なハードルがある。本書は、未来のヒューマノイドの開発に向けて、「バイオメカニクスと運動工学」の視点で人間の体の構造から脳や神経の仕組みに至るまで分かりやすく解説されているのが特徴である。本書を通じて、人間の体の構造を単純にモデリングするだけではヒューマノイドの開発は困難であることが理解できた。例えば、人間の筋肉は収縮させて複雑に動くが、ロボットは油圧アクチュエータ等を伸縮させて動かしている。このとき、ロボットの質量に対するアクチュエータの出力の効率が人間と比べて極めて低い。このことからも人間の体はいかに複雑な構造ながらも効率的に動いていることが分かる。また、私が興味を持ったのは、人間の歩行を力学的に解析し、杖による補助の有効性が力学的に解説されている点である。このように人間の構造をモデリングする手法は超高齢化社会で活躍が期待される介護ロボットの開発に有効であると感じた。また、本書では、専門用語の多くに注釈が付いて分かりやすい点が読者の理解を深める点で秀逸である。是非、工学系の研究者が生物学の知識を得ながらヒューマノイドをイメージして学習するのにお勧めの良書である。
-
掲載日:2024/10/01
-
掲載日:2024/09/03
-
掲載日:2024/07/05
-
掲載日:2024/05/14
おすすめ本
-
-
ヒト心身状態の計測技術 - 人に優しい製品開発のための日常計測 -
高齢化社会において,身体のあらゆる数値をデータ化し,異常な徴候を発見する技術の開発が注目されている。本書は,生体計測に必要な電子回路の基礎技術から生体センサ,近未来の生体計測を解説した,健康計測分野の入門書である。
-
-
人体の力学 - 基礎から学ぶバイオメカニクス -
バイオメカニクスを学ぶ人に,人体の能力・機能の基礎的な理解と正確な解釈をもたらす。
-
-
身体運動のバイオメカニクス
ヒトの身体運動を力学的に取り扱うための基礎知識と,具体的な関節運動および全身運動のバイオメカニクスを解説する。関節運動では,顎,肩,膝,全身運動では歩行,スポーツ,姿勢制御を取りあげた。
-

-
ロボット工学ハンドブック (第3版)
ロボットのあらゆる事項を網羅した,最新・最良の必携ハンドブック。全面大改訂版!!
-
-
身体運動とロボティクス
ロボットと身体で関連する運動の計測と解析について解説,スポーツ科学及びロボティクスの視点から運動の巧みさについて事例を紹介。
-
-
バイオメカニクス
力学をもとに,生体の構造と機能を解析し,医学,工学などに応用する分野であるバイオメカニクスの発展の経緯と領域,生体組織と細胞の力学的特性,心臓血管系と骨格系の構造と機能,組織再構築などの研究をまとめている。
-
-
計測と制御 65巻2号
-
-
身体性知能とシステム・制御
身体性知能が個体の振る舞いのみならず,マルチスケールな現象にも通底することを示す。







