昆虫工学 - 新しい価値を創造する「昆虫の知能」の解明と応用 -
自然が磨き上げた知の体系を新しい価値創造につなげる,「昆虫工学」を扱う画期的な書籍
- 発行年月日
- 2026/07/17
- 判型
- B5
- ページ数
- 240ページ
- ISBN
- 978-4-339-06766-8
- 内容紹介
- まえがき
- 目次
- 広告掲載情報
【本書の特徴】
本書は,わたしたち人間とは「別の世界の住人」である昆虫の知能をひもとき,人間やAIが前提としてきた枠組みを超え,自然が長い時間をかけて磨き上げてきた知の体系を,新しい価値創造へと結びつける「昆虫工学」という新しい体系を提案・紹介するものです。
昆虫の世界は,私たちが「当たり前」と思っている世界とは大きく異なります。視覚・聴覚・嗅覚といった感覚の仕組み,時間のとらえ方,さらには体の大きさに基づく力学的制約まで,昆虫はまったく異なる条件のもとで環境を認識し,行動しています。
近年,人工知能(AI)は大量のデータから新たな価値を生み出す技術として発展してきました。しかしその多くは,人間や人工センサによって取得された「人為的に設計された観測系」に依存しています。したがって,人間の感覚や発想の枠組みの外側にある昆虫の世界は,依然として十分に扱われているとは言えないのです。
昆虫の知能は,数億年にわたる進化の中で環境と相互作用しながら洗練されてきた,もう一つの知の体系です。それを理解し,工学や農学へ応用することは,人間やAIの枠組みを拡張し,新しい発想や設計原理を生み出す契機となります。
本書では,昆虫の知能を支える感覚・脳・行動のしくみを基礎から解説するとともに,それらを応用した技術や研究の最前線を紹介します。
例えば,匂いのセンシングにおいては,昆虫のたんぱく質を利用した超高感度センサや,触角を用いた匂い源探索ロボットの開発が進められています。また,振動感覚を利用した害虫防除といった農学的応用から,羽ばたきロボットや群知能ロボット,ナビゲーションロボットの開発に至る研究も展開されています。さらに,昆虫を遠隔操作する「昆虫サイボーグ」は,その飛行や歩行機能を直接活用することで,被災地における要救護者探索への応用が期待されています。
こうした流れは,昆虫の脳機能を神経細胞レベルから再構築する全脳シミュレーション研究へとつながり,我が国のスーパーコンピュータ「富岳」を用いた取り組みなど,これまでの生物模倣をはるかに超えた新たな研究領域へと発展しています。
読者は本書「昆虫工学」を通じて,「世界の見え方」そのものが変わる体験とともに,新しい価値創造の可能性と新たな学問的視座に触れることになるでしょう。それは,これまでとは異なる世界を起点とした思考への第一歩となるはずです。
【本書のキーワード】
昆虫,環(境)世界,生物知能,群知能,進化,感覚,脳,行動,微小脳,センサ,ロボット,ハイブリッド,サイボーグ,ナビゲーション,羽ばたき飛行,歩行,フェロモン,化学感覚,大規模シミュレーション,遺伝子工学,遺伝子改変,ゲノム編集
まえがき:昆虫工学の重要性
1はじめに
地球上には数百万種を超える多様な生物が生息し,その生活環境は地上,地中,水中,海中などあらゆる領域に及ぶ。生物はこのようなさまざまな生活環境に応じて,多様な構造と機能を獲得した。なかでも生物種のじつに50%(100万種)以上を占める昆虫が示す多様な形態や想像を超えた能力は,われわれに驚きとともに感動を与えてきた。
奇しくも2024年8月25~30日に,昆虫に関わるすべての研究領域の研究者が4年ごとに世界から一同に集い成果を共有する「第27回国際昆虫学会議」が,国立京都国際会館で開催された。本会議は1910年にベルギーのブリュッセルで第1回が開催され110年以上の歴史をもつ最も大きな国際学会の一つである。日本では1980年に京都で開催されて以来,じつに44年ぶりの開催となった。82の国と地域から4000名以上の昆虫研究者が参集し,「New Discoveries through Consilience(知の統合を通じた新たな発見)」をテーマに,未来を見据えた世界との連携を目標に掲げ,進化生物学,分子生物学,応用/農業昆虫学,衛生昆虫学・環境変動,多様性・系統分類・保全,行動・生態・生理と多岐にわたる分野から議論が展開された。そして,さまざまな分野の交流と融合が図られ,持続可能な社会の形成が強く求められる現代における昆虫学の意義が国内外にアピールされた。
本著の監修を務める神﨑亮平は,同会議のプレナリー講演を光栄にも仰せつかり,「Learning from Insect Intelligence -From a Nature-Centered Perspective-」の演題で講演をさせていただいた。昆虫の能力(知能)には学ぶべき点が多いことは周知の事実と思うが,講演では一歩踏み込んで,「Nature-Centered(自然中心)」という視座を重視した。その理由はつぎのとおりである。
これまでの科学技術は,まず人と自然を切り離して自然を研究の対象とし,人を中心として発展を遂げてきた。このような視座によってわれわれは,自然から発見した原理や法則をもとに科学技術を築き,自然にはないものを作る技術,すなわち工学を確立し,多くの恩恵をわれわれ自身にもたらした。一方で,対象とした自然への過剰な負荷から,環境問題やエネルギー・資源の枯渇などの地球規模の課題を生んできたことも事実である。このような状況にあって,われわれに課せられた課題を解決しながら,持続的社会を構築していくうえで忘れてはならないのが,自然との協調や共存である。
しかし,これまでの人間中心の視座のもとで科学技術を発展させても,その場しのぎの解決策にしか至らないだろう。なぜなら,課題の発生も解決も同じ土俵,すなわち人間中心で行われているからである。そのような意味において,今後われわれが自然と協調し,共存することで持続的な社会を構築していくためには,人間中心の視座からヒトも自然の一部であるという自然を中心とした視座へと転回し,どのように科学技術を展開させるかを考える必要がある。そのような視座転回の必要性を世界に向けて伝えたかったことから,「From a Nature-Centered Perspective」をサブタイトルとしたのである。
人間中心から自然中心へと視座を移せば,そこには長い進化の過程を経て,自然との相互作用により獲得された生物の知能がある。なかでも全生物種の50%以上を占める昆虫の知能は,自然と協調した課題解決法の宝庫である。われわれが生み出したロジック(科学や技術)だけではなく,自然との相互作用から獲得された昆虫の戦略を学ぶこと,すなわち感覚や脳,行動からそのしくみを学ぶことで,これまでとは異なった側面から自然と協調したものづくりの鍵が提供されるものと思う。
国際昆虫学会議でのプレナリー講演を契機に,昆虫科学の基礎から応用,さらには実用化を目指した研究を紹介し,これまでとは異なる角度から自然との協調・共存を考える科学技術の新しい分野として『昆虫工学』を確立していくため,本書を出版することにした。
2なぜいま,昆虫なのか
昆虫は三対の脚と二対の翅をもち,からだが頭部と胸部,腹部に分かれる生物と定義される。昆虫の繁栄は,翅による高い移動能力,変態による効率的な資源利用,そして花をもつ植物との共進化が大きな理由であるといわれる。われわれが普段目にする翅のある昆虫が誕生したのは,約5億年前の古生代のデボン紀(約4億1600万年前~約3億5920万年前)である。そして,石炭紀から古生代最後のペルム紀までに現在われわれが知るほとんどの昆虫が出現し,その後,その構造や機能はほぼ変わっていない。地質年代ごとの環境変化による恐竜の絶滅などの事実を考えれば,昆虫の構造と機能が環境変化に対して高い適応性をもっていたことが推測できる。
一方で,昆虫は微小なサイズという,われわれから見れば制限要因とも思われる条件の中で,センサや脳さらには身体を獲得し,適応的な行動を解発するしくみを進化させた。これは,われわれ哺乳類のセンサや複雑な脳とは対照的な設計である。
このような生物(昆虫)がもつ機能,なかでも形状は古くから注目され,まねる(mime)科学(tics),すなわち生物模倣学(バイオミメティクス,biomimetics)として発展し,工学デザイン,ロボティクス,制御システムへと応用されてきた。
生物模倣学に対して『昆虫工学』では,昆虫をシステムとして捉え,生物機能を分子から神経細胞,神経回路,さらには行動と,昆虫が織りなすしくみをマルチスケールで分析して再現することにより,機能や機構を理解したうえで応用を目指すことに主眼が置かれる。昆虫の優れた機能の現象面だけに注目したBiologically inspiredな活用ではなく,昆虫の機能と機構を基礎からよく理解したうえで活用することが重要となる。
それを可能とする背景として,近年,昆虫の感覚や脳・行動のしくみが,遺伝子工学,電気生理学,行動学,情報科学,ロボット工学などのさまざまな研究手法により分析され,さらには分析結果をモデルとして統合したうえで評価できるようになったことが挙げられる。その結果,昆虫の匂いセンサなどはタンパク質レベルから再現されるようにもなった。また,脳機能のしくみもニューロンや神経回路のレベルから詳細に解明され,全脳をスーパーコンピュータで再現して機能をシミュレーションする研究にまで発展し,従来の生物模倣学をはるかに超えた研究が進められるようになった。
3環(境)世界
環境は物理化学的信号で満たされ,それらは時々刻々と変化する。生物はこのような複雑に変化する環境情報を感覚器により捉えることができる。しかし,生物の種類によって感覚器の種類や性能が違い,捉えることができる環(境)情報も異なる。つまり,生物が検出する情報は,その環境に存在する情報の一部でしかなく,検知した情報も生物によってその価値が異なることになる。
われわれヒトは一見,目や耳,鼻,口,肌などを通して,環境下のすべての情報を得ているように思いがちである。しかし,ヒトの目が見ることのできる光の波長は,400~800nmの範囲に限られ,波長に応じて短波長から青→緑→赤と感じているに過ぎない。また,音についても同様で,20Hz~20kHzの範囲に限られる。これは匂い,味,機械感覚などほかの感覚についても同様である。
一方で昆虫は,ヒトが見ることができない紫外線や偏光を知覚できる。紫外線を知覚できることで,花弁の中央部に色の違いができ,そこに蜜があると瞬時に認識できる。これはネクターガイド(蜜標)といわれる。また,超音波を知覚できることも知られ,コウモリの捕食からの回避などに使用されている。
環境の中には多様な物理化学的信号があるにもかかわらず,われわれを含め生物ごとに知覚できる信号は異なっている。このような生物が知覚できる世界のことを,Uexküllは,彼の著書『生物から見た世界』において「環(境)世界」と呼んでいる。
環(境)世界は,時間の解像度(瞬間)にも及ぶ。ヒトは光の点滅を40Hz程度までは区別できるが,それ以上はつねに光って見える。この頻度を「臨界融合頻度」という。ミツバチの臨界融合頻度は310Hzにも達する。ミツバチの羽ばたき頻度は約250Hzなので,羽ばたきのストロークも区別できるが,ヒトにはとてもできない。
さらに,もう一つ重要な点はサイズの問題である。体の体積は長さの3乗に比例し,表面積は2乗に比例する。したがって,サイズが小さくなると体積に対する表面積の比(表面積/体積)が相対的に大きくなり,摩擦力や粘性力のような面積に関係する力の影響が大きくなる。これを「スケール効果」という。つまり,体が小さくなるに従って摩擦力が相対的に大きくなり,想定した力では動かなくなって,空気も蜂蜜のようにねばねばした状態になる。サイズの小さな昆虫にとっては摩擦を軽減する機構を取り入れることが必須となる。昆虫は,われわれとはまったく異なる力関係の世界で行動しているのである。
このように,われわれヒトから見れば同じ環境であっても,生物種によってその感覚の世界,時間の世界,そして支配する力の世界は異なる。つまり,視座をヒトからほかの生物(昆虫)に転回するだけで,ヒトとは異なる課題解決法が見えてくるわけだ。そこに重要な鍵が隠されている。ほかの生物,特に多様な昆虫へと視座を転回することで,われわれの考えがまだ及ばない解決法を見出すことができる。ヒトという限られた世界の中だけからでは新しい価値を見つけ出すのは難しくても,ほかの生物の世界へと広げていくことによって,新しい価値創造が可能になる。そこに,『昆虫工学』の重要な役割と意味がある。
4昆虫の能力(知能)
昆虫はその感覚器で環境下の情報を捉え,脳神経系による情報処理を介して,身体を駆動して適応的な行動を発現する。昆虫の行動は,単純な反射から定型的行動パターン(fixed action pattern,FAP),パブロフの犬の条件反射の実験で有名な古典的条件づけにまで至る。さらに驚くべきことには,顔認識や個体識別などの高度な認知行動までも示す。餌を求めて摂食する採餌行動はよく見かけるが,味覚はもちろん,嗅覚,視覚,機械感覚などさまざまなモダリティの感覚情報が適切に処理されることで,初めて可能となる行動である。
また,現在の科学技術でもまだ解決に至っていない課題を解いてもいる。例えば,オスのガが空中に漂うフェロモンの匂いを頼りに,遠く離れたメスのパートナーを探索するのはよい例である。特定の匂いの検知やその探索は,現在の工学でも難問であり,まだその実用化には至っていない。昆虫は,このような課題を,昆虫の環(境)世界に潜む信号刺激やその処理により解決している。昆虫は課題解決法の宝庫であり,そこにはヒトが到達し得ない解決法のヒントが潜んでいる。
昆虫の小さなサイズもまた,さまざまな特徴を生むことになる。サイズが小さくなるほど体積に対して表面積の比(表面積/体積)が相対的に大きくなる。これを「スケール効果」ということは前述したが,この効果により体表面に多くの感覚器を配置できる。昆虫はその脳を構成する神経細胞数(10~100万個)と同じオーダーの数の感覚器(嗅覚:10万,視覚:50万)を体中に張り巡らしている。これに対して哺乳動物では,感覚器の数(嗅覚:600万,視覚:1.2億)は脳を構成するニューロン数(1000億)の1%にも満たないのである。
このような特徴から,昆虫の感覚情報処理は感覚器に重点が置かれ,小さな脳の負荷を減らすことができる。広範にセンシングして巨大な脳の処理に頼る哺乳類とは情報処理のしくみが異なる。ガのフェロモンの匂いを検出する感覚器が,フェロモンにしか応答しない「スペシャリスト」であるのはよい例である。このような昆虫のセンサの特徴は,高感度高選択性のセンサとして再現して活用するにはうってつけなのである。
また,サイズが小さくなると飛行や遊泳,歩行に必要な制御系にも違いが出てくる。制御系の応答は1/L(Lはサイズ)の割合で速くなることが要求される。これは水に浮かべた小さな船が異様に速く揺らいでいることからもわかるだろう。したがって,昆虫のような小さなサイズの生物の制御系では制御の遅れを生じないように,情報処理に関わる脳(神経節)が頭部,胸部,腹部に分散する分散脳という神経系を獲得し,機能を分散することで速い処理に対応しているのである。
昆虫がもつわれわれの想像を超えた環境への適応の背景にはさまざまなしくみが潜んでいる。そのしくみを知ることは,昆虫の生きるしくみを知るうえで重要であるばかりか,そのしくみをセンサや機械システムなど工学に生かすことで,われわれの直感や思考を超えた新しい価値を創造するうえでも重要となる。
5本書の構成
本書は,地球上で最も繁栄し,小型・軽量・低コストの情報処理装置の傑作である昆虫について,その基礎研究から応用,社会実装の現状をわが国の代表的な研究者に執筆いただき,『昆虫工学』としてまとめて紹介するものである。
本書は2部構成になっており,各部は章で構成される。第1部は「基礎編」で,昆虫の行動,中枢処理,センサの3章からなる。各章は関係分野の研究者に執筆いただき,第1章は櫻井健志,第2章は並木重宏,第3章は光野秀文が編著者としてとりまとめた。第2部は「応用編」で4章からなり,祐川侑司がとりまとめた。各章の内容や本著全体での位置づけは,各編著者がそれぞれの執筆箇所で紹介している。
『昆虫工学』では,生物機能を分子から神経細胞,神経回路,さらには行動のさまざまな階層からシステムとして捉え,それを再現することで理解し,応用することに主眼が置かれる。第1部に「基礎編」を置いたのはそのような理由による。昆虫の優れた機能の現象面だけに注目した応用ではなく,昆虫の機能と機構を基礎から理解したうえでの活用を目指している。
昆虫の行動に関する第1章では,昆虫の進化的起源についても解説され,環境との相互作用により獲得された昆虫の適応的行動,ナビゲーション戦略や,昆虫の繁栄のきっかけとなった飛翔行動,さらには社会的相互作用についても相利共生から解説されている。
中枢処理に関する第2章では,昆虫の微小脳の進化から感覚情報処理,行動制御のしくみについて具体的な事例を挙げながら紹介している。また,昆虫の歩行制御や概日リズム,さらには睡眠についての最新の知見も示されている。
昆虫の感覚に関する第3章では,視覚,聴覚,機械感覚,温度感覚,嗅覚,味覚に焦点を当て,それらのセンサ(感覚器)の構造や機能が解説されている。
第2部は「応用編」として,昆虫の感覚器によるセンシングと神経系での情報処理,それに基づく行動など,昆虫のもつ機能の工学や農学への応用について紹介されている。昆虫の振動感覚を利用した害虫防除などの農学応用,嗅覚受容体を利用した匂いセンサ開発,羽ばたきロボット,群知能ロボットやナビゲーションロボットの開発に至る研究が挙げられている。
なかでも昆虫自体を遠隔操作する「昆虫ハイブリッドロボット」は,昆虫の飛行機能などを直接利用したユニークな研究であり,近年研究が長足の進歩を遂げ,被災地での要救護者の捜索に向けた実用研究へと展開している。また,昆虫の脳機能を神経細胞から再構築することで探究する昆虫全脳シミュレーションは,わが国のフラッグシップスーパーコンピュータである「富岳」を用いた研究であり,全脳のリアルタイムシミュレーションの実現を目指した研究である。さらに,現代の工学技術だけでは困難な課題を昆虫を活用して解決を図る例として,超高感度の匂いセンサを昆虫の嗅覚受容体から再現する技術も紹介されている。
昆虫の機能や機構を精緻に分析し再現できるようになった背景には,研究手法の飛躍的な進歩がある。そこで,本書ではその代表となる電気生理学や遺伝子工学の技術,そして昆虫の機能を分析するロボット技術についてもコラムを設けて解説することにした。
われわれヒトの発想や原理に基づいたものづくりはもちろん重要であるが,ヒトよりはるか以前から地球に生息し100万種もの多様な種として発展を遂げた昆虫の視座での発想や,そこで機能する原理に基づいた『昆虫工学』は,今後必要となる自然と協調し共存しながら課題を解決する科学技術の新しい道を拓いていくものと思う。
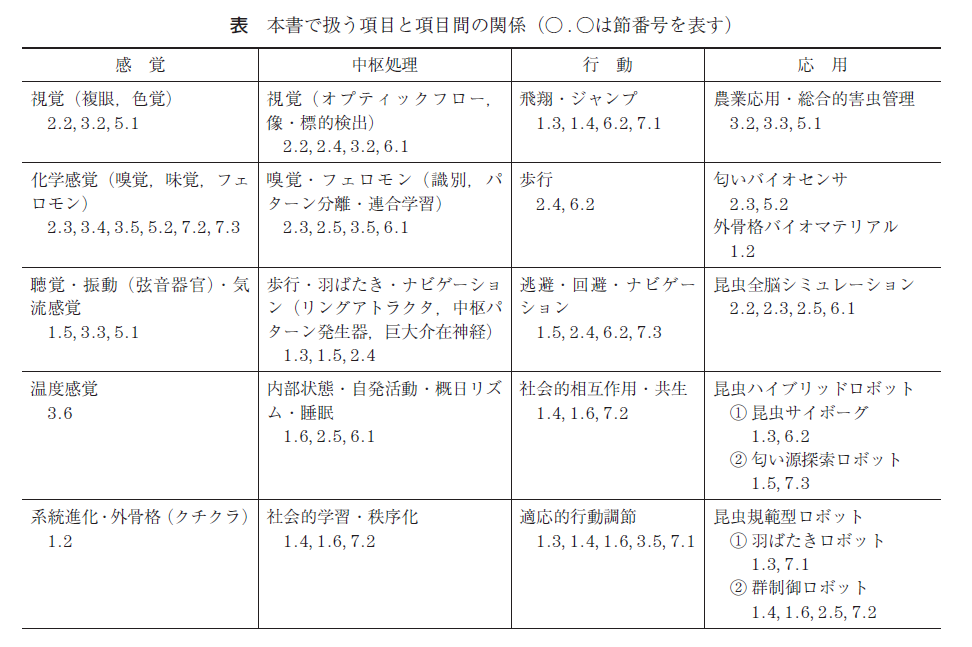
最後に本書をご覧いただくにあたり,第1部基礎編,そして第2部応用編で扱う項目と項目間の関係を示した表を作成したので,興味ある内容から読み進めてもらいたい。関連する項目を参考とすることで,より深く昆虫,そして『昆虫工学』の面白みがわかっていただけるものと思う。
2026年5月
監著者 神﨑亮平
第1部 基礎編
1.行動
1.1 昆虫の多様な行動
1.2 昆虫の進化的起源の探索
1.2.1 外骨格を通して昆虫について考える
1.2.2 昆虫の一般的な分類
1.2.3 昆虫が独自に獲得した外骨格硬化のしくみ
1.2.4 外骨格構造の進化と応用
1.2.5 昆虫外骨格の応用に向けて
1.3 飛翔行動の神経・筋・骨格メカニズム
1.3.1 昆虫の飛行に学ぶ
1.3.2 飛翔筋の構造と機能
1.3.3 羽ばたき運動を生み出す神経メカニズム
1.3.4 昆虫飛行の統合的理解に向けて
1.4 環境知覚と適応的行動
1.4.1 環境の知覚
1.4.2 内部状態に応じた行動の発現
1.4.3 身体構造と適応行動の発現
1.4.4 人工物の設計と制御に向けて
1.5 昆虫のナビゲーション戦略と指向性逃避行動の状況依存的制御
1.5.1 はじめに:昆虫の移動について
1.5.2 昆虫の多様なナビゲーション戦略
1.5.3 指向性逃避行動の状況依存的制御
1.6 好蟻性昆虫によるアリ社会への統合戦略
1.6.1 アリの社会
1.6.2 好蟻性昆虫
1.6.3 栄養報酬
1.6.4 学習と認知
1.6.5 化学擬態
1.6.6 行動操作
1.6.7 好蟻性昆虫によるアリの認識
1.6.8 アリ社会への統合戦略に関する今後の展望
引用・参考文献
2.中枢処理
2.1 昆虫脳の情報処理機構
2.2 視覚情報の情報処理機構
2.2.1 昆虫の視覚が生み出す行動
2.2.2 視覚信号の流れと視覚神経回路
2.2.3 眼の空間分解能と感度
2.2.4 色の情報処理
2.2.5 動きの情報処理
2.2.6 昆虫に学ぶ信号抽出のしくみ
2.3 嗅覚系高次中枢の情報処理
2.3.1 末梢:匂い分子の受容
2.3.2 一次中枢:応答の調節
2.3.3 高次中枢:応答パターンの分離
2.3.4 匂いの「価値」に基づく行動選択
2.3.5 もう一つの嗅覚系高次中枢
2.3.6 昆虫嗅覚研究の今後
2.4 歩行運動と探索行動を制御する脳機能
2.4.1 昆虫を用いた歩行運動制御の理解
2.4.2 ショウジョウバエを用いた脳研究の魅力
2.4.3 昆虫脳の中心複合体の探索行動における機能
2.4.4 昆虫脳の視覚回路による歩行・飛行軌道制御
2.4.5 歩行運動制御のさらなる理解と応用
2.5 神経回路の自発活動パターンとその機能的役割
2.5.1 自発活動パターンとは
2.5.2 発達段階における自発活動パターンの機能性
2.5.3 感覚系の神経回路の自発活動パターン
2.5.4 内部状態モニタリングとしての自発活動パターン
2.5.5 自発活動パターンの昆虫工学的応用に関する今後の展望
引用・参考文献
3.昆虫のセンサ(感覚器)の構造と機能
3.1 センサ(感覚器)の多様性と応用
3.1.1 センサの多様性
3.1.2 感覚器・機能の活用例
3.1.3 本章について
3.2 昆虫の光受容と視覚情報処理(視覚・色覚)
3.2.1 複眼の構造と光適応
3.2.2 個眼の視細胞構成とその機能
3.2.3 色覚の神経機構
3.3 昆虫の振動・聴覚器の構造と機能
3.3.1 振動・聴覚を司る共通のセンサ
3.3.2 弦音器官の基本構造
3.3.3 振動・聴覚器の進化
3.3.4 振動受容器
3.3.5 聴覚器
3.3.6 弦音器官の周波数フィルタリングと増幅
3.3.7 生物工学への応用と今後の展望
3.4 昆虫の嗅覚・味覚の受容体構造と機能
3.4.1 昆虫における環境中の化学物質の役割
3.4.2 体外の物質を検知する化学感覚器
3.4.3 化学感覚器で機能する受容体ファミリーとその発現
3.4.4 化学感覚受容体の機能
3.4.5 嗅覚および味覚受容体の立体構造
3.4.6 生物機能を工学利用するうえでの,今後の昆虫嗅覚研究の課題
3.5 昆虫のフェロモン受容機能と情報処理
3.5.1 ガとゴキブリの性フェロモン
3.5.2 性フェロモンの受容機構
3.5.3 一次嗅覚中枢触角葉の性的二型
3.5.4 ガとゴキブリの大糸球体における性フェロモン情報処理機構
3.5.5 まとめ:飛翔昆虫と歩行昆虫のフェロモン情報処理戦略
3.6 温度受容や刺激受容を生み出すしくみ
3.6.1 昆虫での温度受容研究
3.6.2 ハエの温度センサの種類
3.6.3 TRPチャネルを介した温度受容
3.6.4 GRを介した温度受容(高温センサ)
3.6.5 IRを介した温度受容(高温・低温センサ)
3.6.6 GPCRを介した温度受容
3.6.7 Anoctaminを介した温度応答の増強
3.6.8 その他の昆虫がもつ温度センサと温度受容
3.6.9 温度センサの温度応答機構
3.6.10 環境問題と工学的応用に向けた今後の展望
引用・参考文献
第2部 応用編
4.昆虫機能の工学応用
引用・参考文献
5.昆虫のセンサに関わる工学応用
5.1 感覚機能の農業応用(感覚応用)
5.1.1 害虫防除と感覚機能
5.1.2 振動を利用した害虫防除
5.1.3 光を利用した害虫防除
5.1.4 感覚機能を応用した害虫防除の展望
5.2 匂いバイオセンシングシステム
5.2.1 生物のしくみを利用した匂いセンサ
5.2.2 センサのしくみ
5.2.3 液相匂いバイオセンサシステム
5.2.4 気相匂いバイオセンサシステム
5.2.5 昆虫のしくみを利用した匂いセンサのまとめ
引用・参考文献
6.昆虫の中枢処理に関わる工学応用
6.1 昆虫神経系大規模シミュレーションの基礎とその展望
6.1.1 はじめに
6.1.2 神経細胞と細胞モデル
6.1.3 フィードフォワードネットワークと昆虫脳
6.1.4 再帰的なネットワークと昆虫局所回路
6.1.5 昆虫のシミュレーションの例
6.1.6 展望:並行する高次機能と全脳シミュレーション
6.1.7 結語
6.2 昆虫ハイブリッドロボット
6.2.1 研究開発動向
6.2.2 研究開発例
6.2.3 最後に
引用・参考文献
7.昆虫の行動に関わる工学応用
7.1 羽ばたきロボット
7.1.1 飛行ロボットの基礎設計
7.1.2 要素設計について
7.1.3 羽ばたきロボットの例
7.1.4 飛翔生物の行動に関わる羽ばたきロボットの課題と展望
7.2 群知能アルゴリズム
7.2.1 昆虫と群知能
7.2.2 間接的相互作用による秩序形成
7.2.3 解探索への応用: Ant Colony Optimization
7.2.4 活動状態の自己組織的調整
7.2.5 生物の実践的行動の応用可能性
7.3 昆虫の行動戦略を模倣した嗅覚ナビゲーションロボット
7.3.1 嗅覚ナビゲーションの背景
7.3.2 地上走行型ロボットによる嗅覚ナビゲーション
7.3.3 ドローンを用いた3次元的嗅覚ナビゲーション
7.3.4 嗅覚ナビゲーションの展望
引用・参考文献
コラム
コラム1 電気生理学的計測手法
コラム2 昆虫の脳と行動を調べるロボット技術
コラム3 遺伝子組換えとゲノム編集
引用・参考文献
あとがき:昆虫工学が拓く新しい価値創造
索引




-
掲載日:2026/06/19
-
掲載日:2026/06/19
-
掲載日:2026/06/15
神﨑研究室ホームページ
『研究紹介』より『匂い源探索ドローン』
フェロモン刺激に応答するドローン。フェロモン刺激に応答して触角電図が計測されるのがわかる。
関連リンク
おすすめ本
-
-
Pythonで始めるスワーム制御プログラミング
群れをなす生物の振る舞いを応用するスワーム制御をPythonを使って体感できる。
-
-
身体性知能とシステム・制御
身体性知能が個体の振る舞いのみならず,マルチスケールな現象にも通底することを示す。
-
-
物理の眼で見る生き物の世界 - バイオミメティクス皆伝 -
生物の様々な不思議を高校生レベルの物理で解き明かし,物理の視点から生物を観察・解釈して楽しむとともに,気づきの力を養う一冊。
-
-
生物機械工学 - 数理モデルで生物の不思議に迫る -
工学的視点から見えてくる生物特有の興味深い特徴を紹介することを主眼に,大学初学年でも学べるように平易に解説した入門書である。
-
-
メタヒューリスティクスとナチュラルコンピューティング
ナチュラルコンピューティングは,生物や物理現象に観察される最適化のプロセスを,計算アルゴリズム化した汎用性のある発見的な最適化方法である。本書では,従来の最適化方法を橋渡しにこれらについてわかりやすく解説する。
-
-
天然物化学
生合成を基盤に体系化した解説を行うとともに,ケミカルバイオロジーの観点を重視した天然物化学の学部生向け教科書。
-
-
香料化学 - におい分子が作るかおりの世界 -
においとはいったい何か。基本的な有機化学をもとに,においを科学的に理解する。
-
-
香りをたずねて
古代エジプトの昔からの香りの歴史を,クレオパトラ,楊貴妃,ナポレオン等のエピソードを交えて面白く辿り,さらに香水作りの話,動・植物とニオイ,ニオイの科学へと,魅力尽きない香りの世界へ誘う。
-
-
ネットワークシステムの分散協調制御
システム制御の研究を行う上で必須の知識であるネットワークシステムの分散協調制御を解説
-
-
自律的行動創発システムと身体性 - 機械獣の構成論 -
ロボットにおける恒常性という観点に基づく行動創発を構成論的に追求した。
-
-
ロボットの確率・統計 - 製作・競技・知能研究で役立つ考え方と計算法 -
ロボット分野だけに限定した,様々な確率・統計の知識を学ぶことができる書籍
-
-
不整地移動ロボティクス
瓦礫や段差が混在した不整地を移動するロボットについて,機構や力学,制御を広範に解説。
-
-
ROSロボットで学ぶ次世代のIoTアーキテクチャ
エンジニアや研究者として成功するための勉強方法やキャリアについて知りたい方必携!
-

-
ロボット工学ハンドブック (第3版)
ロボットのあらゆる事項を網羅した,最新・最良の必携ハンドブック。全面大改訂版!!
-
-
LiDARを用いた高度自己位置推定システム - 移動ロボットのための自己位置推定の高性能化とその実装例 -
「自己位置推定」における頑健性や信頼度などの問題点に対して,その解決手法を解説
-
-
バイオミメティクスから学ぶ有機エレクトロニクス
有機エレクトロニクスで,特にバイオミメティクスに重点を置いての基礎理解を目標とした。
-
-
水中生物音響学 - 声で探る行動と生態 -
視界のきかない水中では通信・探査に音を利用する。主に水中生物の音声とこれを利用した観測手法及び騒音影響評価について紹介。
-
-
生き物から学ぶ まちづくり - バイオミメティクスによる都市の生活習慣病対策 -
都市を生き物としてとらえ,都市がどのような病理に侵されているかを示し,「生き物に教えを乞う」という観点から解決策を模索する。







