06/25
昆虫サイボーグとは?ゴキブリ研究から見る仕組み・メリット・課題
昆虫サイボーグ(サイボーグ昆虫)は、生きた昆虫の体に電子デバイスを装着し、その行動を遠隔操作する技術です。
特にゴキブリを用いた研究が注目されており、その驚異的な生命力と走破性を活かした災害救助などへの応用が期待されています。
本記事では、昆虫サイボーグの仕組みからメリット、実用化に向けた課題までを詳しく解説します。
昆虫サイボーグとは?生物と機械が融合した最先端技術の概要
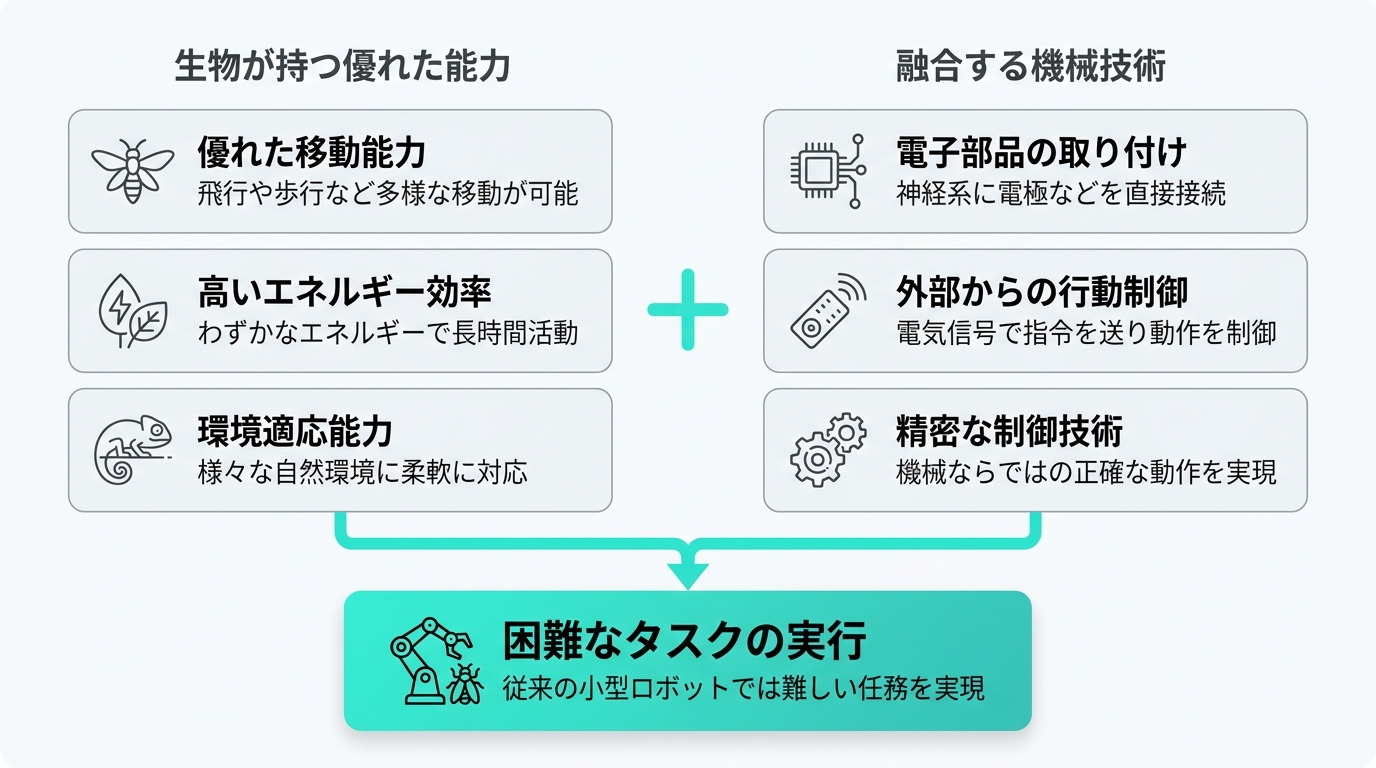
昆虫サイボーグとは、昆虫の神経系に電極などの電子部品を取り付け、外部からの電気信号によってその行動を制御する技術を指します。
この「虫サイボーグ」は、生物が本来持つ優れた移動能力やエネルギー効率、環境適応能力と、機械の精密な制御技術を組み合わせたものです。
これにより、従来の小型ロボットでは困難だったタスクの実行が期待されています。
ロボット工学については「ロボット工学ハンドブック(第3版)」で詳しく紹介しています。
ゴキブリがモデル!昆虫サイボーグが遠隔操作できる仕組み
昆虫サイボーグの研究では、特にマダガスカルゴキブリがモデルとして多用されます。
ゴキブリは体が大きく頑丈でデバイスを搭載しやすいうえ、狭い場所や瓦礫の上でも進むことができる高い走破性を持っています。
その遠隔操作は、昆虫の神経系と外部の電子デバイスを精密に連携させることで実現します。
昆虫の神経系に超小型の電極やデバイスを装着
昆虫サイボーグの制御は、まず昆虫の体に行動を司るデバイスを装着することから始まります。
具体的には、昆虫の方向転換に関わる触角の付け根や、脚の動きを制御する胸部の神経節に、髪の毛ほどの細さの電極を埋め込みます。
これにより、外部から神経へ直接アクセスし、行動を操作するための物理的なインターフェースを構築します。
背中の制御ユニットから電気信号を送り行動を誘導
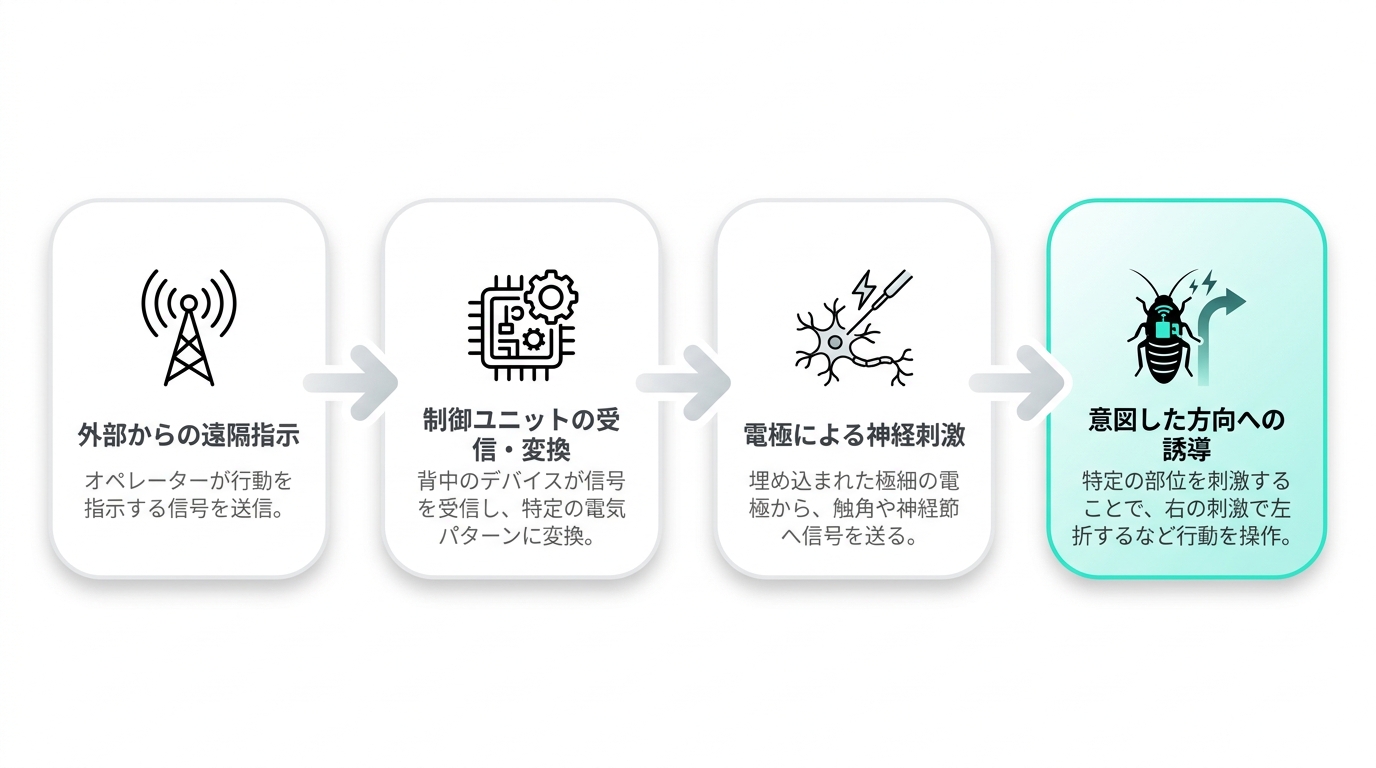
背中には、無線通信機やバッテリー、マイクロコントローラーを搭載した超小型の制御ユニットを取り付けます。
オペレーターが遠隔から指示を送ると、制御ユニットがそれを受信し、特定のパターンを持つ電気信号に変換します。
この信号を神経に埋め込まれた電極へ送ることで、例えば右の触角を刺激して左に曲がらせるなど、昆虫の行動を意図した方向へ誘導します。
太陽電池パネル搭載で半永久的な稼働を目指す
昆虫サイボーグの課題の一つは、搭載する電子デバイスのバッテリー持続時間です。
この問題を解決するため、理化学研究所などのチームは、昆虫の背中に貼り付けられる超薄型の有機太陽電池パネルを開発しました。
これにより、外部からの電力供給なしで半永久的にデバイスを稼働させることが可能になり、長期間にわたる監視や探索活動への道が拓かれます。
なぜロボットではない?昆虫サイボーグが持つ優れたメリット
超小型ロボットの開発も進む中で、あえて生きた昆虫を利用するのには明確な理由があります。
昆虫サイボーグは、エネルギー効率、悪路走破性、自己修復能力といった点で、現在のマイクロロボット技術を凌駕する優れたメリットを備えています。
これらの生物ならではの特性が、特定の用途において大きなアドバンテージとなります。

圧倒的なエネルギー効率で長時間の活動を実現
昆虫は、自身の食事から得た化学エネルギーを非常に効率よく活動エネルギーに変換します。
そのため、搭載する電子回路の消費電力は極めて小さく、バッテリー駆動の小型ロボットとは比較にならないほどの長時間の活動が可能です。
これにより、一度現場に投入されれば、充電のために回収することなく、数時間から数日にわたる継続的な任務を遂行できます。
小型ロボットでは走破不能な狭所や悪路にも侵入可能
昆虫、特にゴキブリは、自身の体高よりはるかに狭い隙間を体を扁平にさせて通り抜けたり、不安定な瓦礫の上を巧みにバランスを取りながら進んだりする能力を持っています。このような走破性は、生物が数億年の進化の過程で獲得したものです。
ゴキブリの能力にヒントを得て、狭い隙間を通り抜けたり、不安定な地形を移動したりできるロボットの研究開発が進められています。例えば、カリフォルニア大学バークレー校では、ゴキブリの関節機構を参考にした圧縮可能な躯体を持つ捜索救援ロボット「CRAM」が開発されました。また、タウ技研はワーム型機構を搭載したロボットの開発を進めていました。TED Talksでは、ゴキブリからヒントを得たDASHロボットがダメージ耐性や壁を登る動作を再現していると紹介されています。
これらの技術は、災害現場など複雑な環境での活動において大きな強みとなる可能性があります。
生物ならではの自己修復能力と高い環境適応力
機械であるロボットは、部品が一つでも故障すると機能不全に陥ることがあります。
一方、生物である昆虫は、脚が一本折れるといった軽微な損傷であれば、活動を継続したり自己修復したりする能力を持っています。
また、温度や湿度の変化といった外部環境への適応力も高く、多様な条件下で安定したパフォーマンスを発揮することが可能です。
昆虫サイボーグ実用化への課題と倫理的な問題点
昆虫サイボーグは大きな可能性を秘めている一方、その実用化には技術的、倫理的な課題が山積しています。
昆虫の生命をツールとして利用することへの社会的なコンセンサスや、技術が悪用された際のリスク管理など、解決すべき問題は少なくありません。
これらの課題への対応なくして、技術の社会実装は進みません。
昆虫の意思は尊重されるべきか?動物倫理の観点からの議論
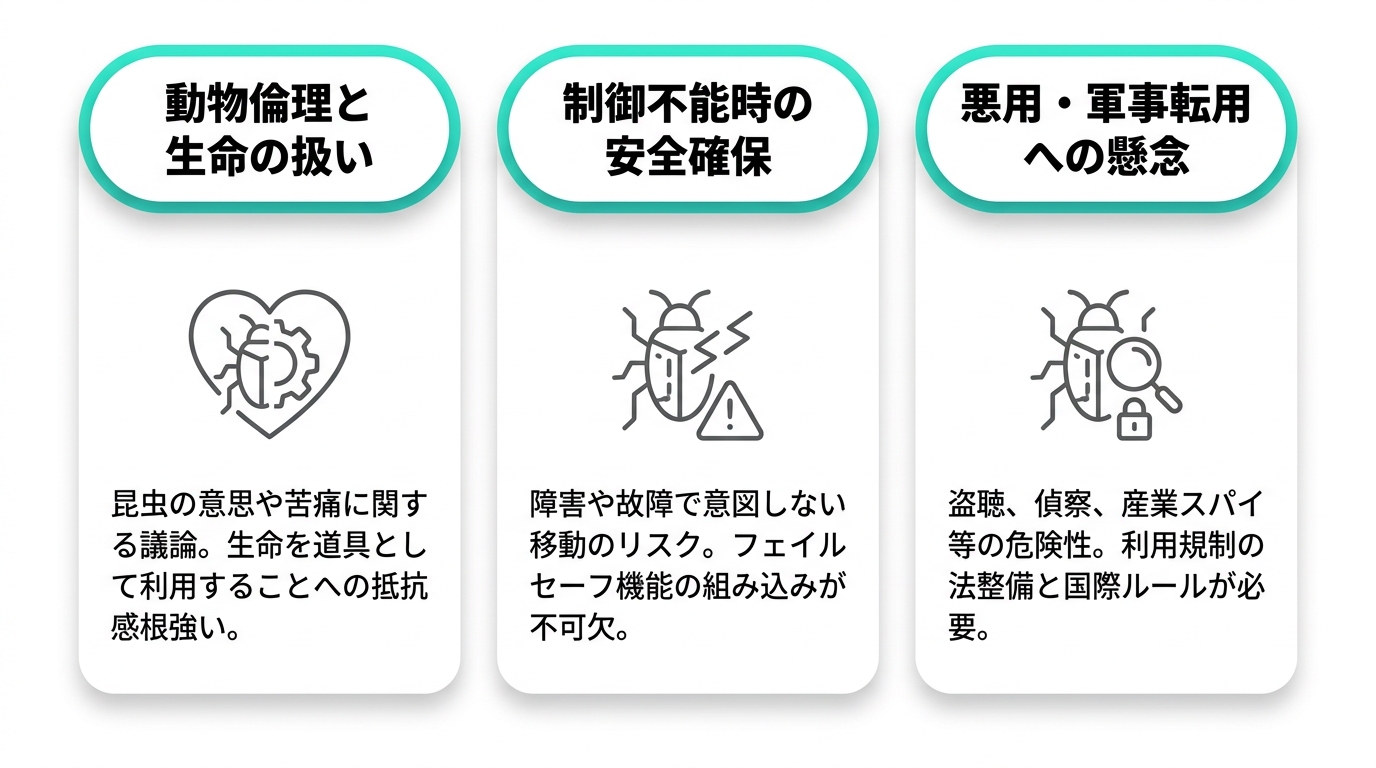
生きた昆虫の行動を外部から強制的に制御する行為は、動物倫理の観点から議論を呼んでいます。
昆虫が苦痛を感じるか否かについては科学的な見解が分かれていますが、生命の意思を無視して道具として扱うことへの倫理的な抵抗感は根強く存在します。
技術の有用性と生命倫理のバランスをどのように取るか、社会全体での議論が必要です。
制御不能時のリスクと安全確保の必要性
昆虫サイボーグが、電波障害やデバイスの故障によって制御不能に陥るリスクも考慮しなければなりません。
意図しない場所へ移動してしまったり、搭載したセンサーからの情報が途絶えたりする可能性があります。
特に、何らかの有害物質を検知するセンサーを搭載している場合など、安全を確保するためのフェイルセーフ機能や自律的な停止機能の組み込みが不可欠です。
技術の軍事転用や悪用に対する懸念
小型で探知されにくい昆虫サイボーグは、盗聴や偵察といった軍事目的や、産業スパイなどの犯罪行為に悪用される危険性をはらんでいます。
技術が普及する前に、その利用方法を規制する法整備や国際的なルール作りが求められます。
技術開発者は、こうした負の側面にも目を向け、悪用を防ぐための対策を講じる責任があります。
昆虫サイボーグの具体的な活用事例と将来性
昆虫サイボーグ技術は、まだ社会実装に向けた研究開発段階にありますが、その小型・軽量・高機動性を活かせる応用分野は多岐にわたります。JSTムーンショット型研究開発事業のプロジェクト「人・AIロボット・生物サイボーグの共進化による新ひらめきの世界」では、森島圭祐・大阪大学教授をプロジェクトマネージャーとし、佐藤裕崇・南洋理工大学教授(大阪大学客員教授)らが、生物サイボーグを活用した技術開発を進めています。サイボーグ昆虫については、災害救助への迅速な投入、社会インフラの点検、探索活動などへの応用・実用化が期待されています。
昆虫の知能と応用については「昆虫工学- 新しい価値を創造する「昆虫の知能」の解明と応用 -」で詳しく紹介しています。
災害現場での要救助者捜索活動への応用
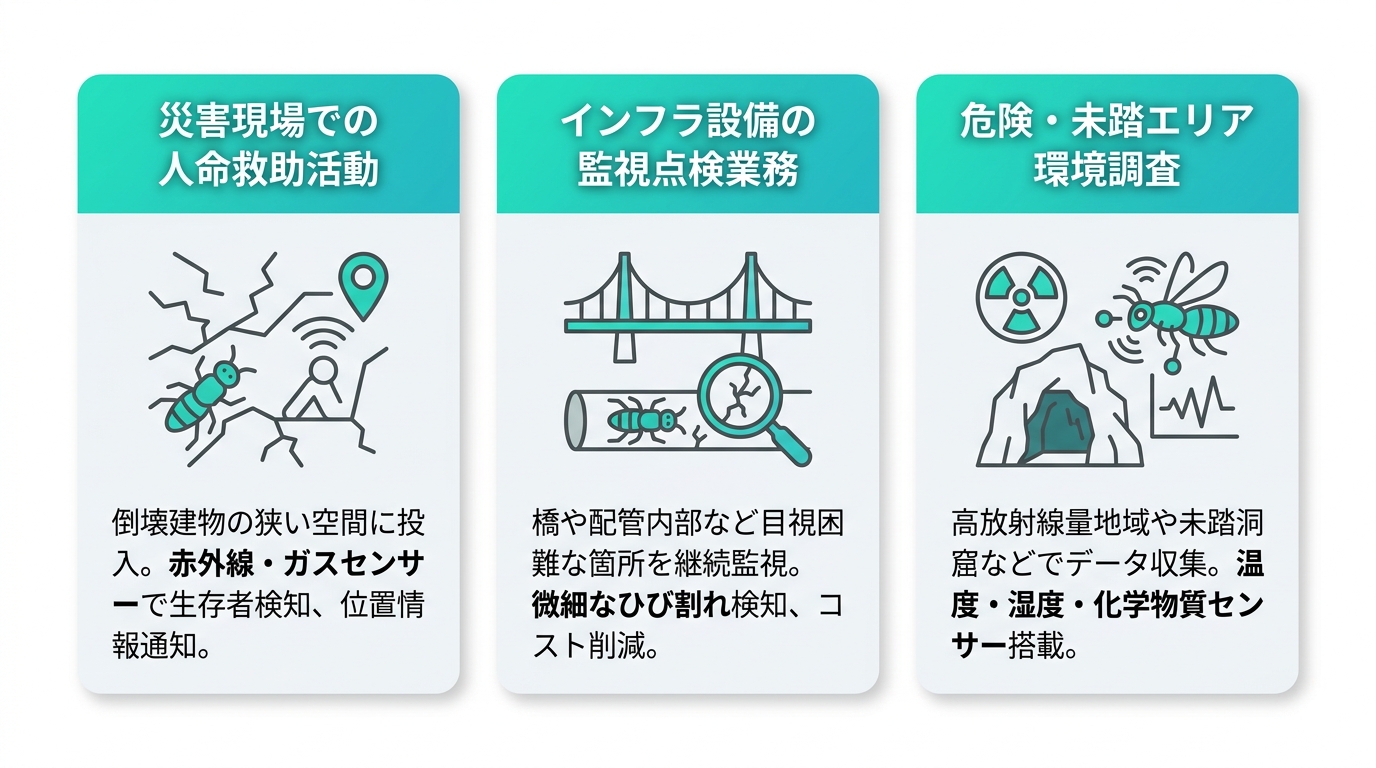
最も期待される応用例が、地震や土砂災害の現場での人命救助です。
倒壊した建物の瓦礫の下など、救助隊員やロボットが進入できない狭い空間に複数の昆虫サイボーグを投入します。
搭載された赤外線センサーやガスセンサーで生存者の存在を検知し、その位置情報を知らせることで、迅速な救助活動につなげることが可能です。
インフラ設備の劣化や損傷を監視する点検業務
橋やトンネル、下水管といった社会インフラは老朽化が進んでおり、定期的な点検が欠かせません。
昆虫サイボーグを使えば、人間が目視できないような配管の内部や、橋梁の微細なひび割れなどを継続的に監視できます。
これにより、点検コストを大幅に削減しつつ、事故を未然に防ぐインフラメンテナンスの効率化が実現します。
立ち入り困難なエリアでの環境モニタリング調査
原子力発電所の事故現場のように放射線量が高いエリアや、人間が立ち入ることが難しい未踏の洞窟、熱帯雨林の奥地などでの環境調査にも応用できます。
昆虫サイボーグに温度、湿度、放射線、特定の化学物質などを検知するセンサーを搭載し、広範囲にわたる詳細な環境データを収集することが可能になります。
昆虫サイボーグに関するよくある質問
昆虫サイボーグは、災害救助やインフラ点検、探索・調査活動などへの応用が期待されている研究分野です。ここでは、実用化の状況や、使われる昆虫の種類、昆虫型ロボットとの違いについて解説します。
昆虫サイボーグは実用化されていますか?
昆虫サイボーグは現在、研究開発段階にあり、本格的な社会実装には至っていません。ただし、実用化を見据えた技術開発は進んでいます。
例えば、佐藤裕崇教授らの研究グループは、複数のサイボーグ昆虫を群れとして移動させる制御アルゴリズムを実験的に検証しています。また、JSTムーンショット型研究開発事業では、マダガスカルゴキブリに電子デバイスを自動で取り付ける技術も発表されており、将来的に多数の個体を災害救助やインフラ点検などへ活用するための基盤技術として期待されています。
一方で、実際の災害現場で運用するには、通信の安定性、位置推定、耐久性、安全性、倫理面など、まだ解決すべき課題があります。
昆虫サイボーグに使われる昆虫はゴキブリだけですか?
昆虫サイボーグの研究では、ゴキブリ、特にマダガスカルゴキブリが代表的なモデルとして使われています。体が比較的大きく、電子デバイスを搭載しやすいことに加え、狭い場所や複雑な地形を移動する能力に優れているためです。
ただし、研究対象はゴキブリだけではありません。過去には、飛行能力を持つ甲虫を使ったサイボーグ昆虫の研究も行われています。また、カイコガのように、昆虫の優れた嗅覚を利用して特定の匂いを検出する「センサ昆虫」の研究も進められています。
このように、用途に応じて昆虫の移動能力、飛行能力、嗅覚などを活用する研究が進んでいます。
昆虫サイボーグと昆虫型ロボットの違いは何ですか?
昆虫サイボーグと昆虫型ロボットの大きな違いは、生きた昆虫を使うか、機械だけで作られているかです。
昆虫型ロボットは、昆虫の構造や動きを参考にして作られた機械です。移動にはモーターやアクチュエータを使うため、バッテリー容量や制御の複雑さが課題になります。
一方、昆虫サイボーグは、生きた昆虫の身体能力をそのまま利用します。移動そのものは昆虫が行うため、電子デバイスは主に行動を誘導するために使われます。そのため、小型ロボットでは難しい狭所や複雑な地形での移動、低消費電力での活動が期待されています。
ただし、生物を利用する以上、制御の安定性や個体差、倫理的な問題にも配慮する必要があります。
まとめ
昆虫サイボーグは、生物の持つ卓越した能力と機械の制御技術を融合させた革新的な技術です。
その仕組みは昆虫の神経系に直接働きかけるもので、圧倒的なエネルギー効率と走破性を実現します。
災害救助やインフラ点検などへの応用が期待される一方、動物倫理や悪用のリスクといった社会が向き合うべき課題も存在します。
今後の技術の進展とともに、その適切な活用に向けた社会的な議論が重要になってきます。
当サイトでは、情報整理や下書き作成の一部にAIツールを活用する場合があります。
掲載前には担当者が内容を確認・編集し、最終的な責任を持って公開しています。